Slam application
SLAM stands for “simultaneous location and mapping” and refers to a image-based technique to identify and trace certain keypoints in an image stream and reconstruct the surroundings (map) and the camera movement (location).
A small sample application, based on openVSlam (external link) is available through the HemiStereo eco-system. It is not meant for production use but for illustration purposes.
Installation
The application is available as docker image (as other HemiStereo apps), and can be installed automatically using apt:
sudo apt update
sudo apt install 3dvl-slam
Note
The slam application contains a seperate image-processing pipeline and requires exclusive access to the camera devices, thus it must be operated without other apps using the camera beeing active (e.g. the stereo-backend must be switched off)
For the activation of the app, make sure the stereo-backend (and possibly other camera-requiring apps) is stopped and disabled first:
sudo hemistereo_app_stop stereo-backend
sudo hemistereo_app_disable stereo-backend
Finally, the slam app can be activated:
sudo hemistereo_app_enable slam
sudo hemistereo_app_start slam
This should download and start two docker images/containers.
Usage
The app is only meant for demonstration purposes and contains a viewer application available through your web-browser as:
http://<SENSOR-IP>:3001
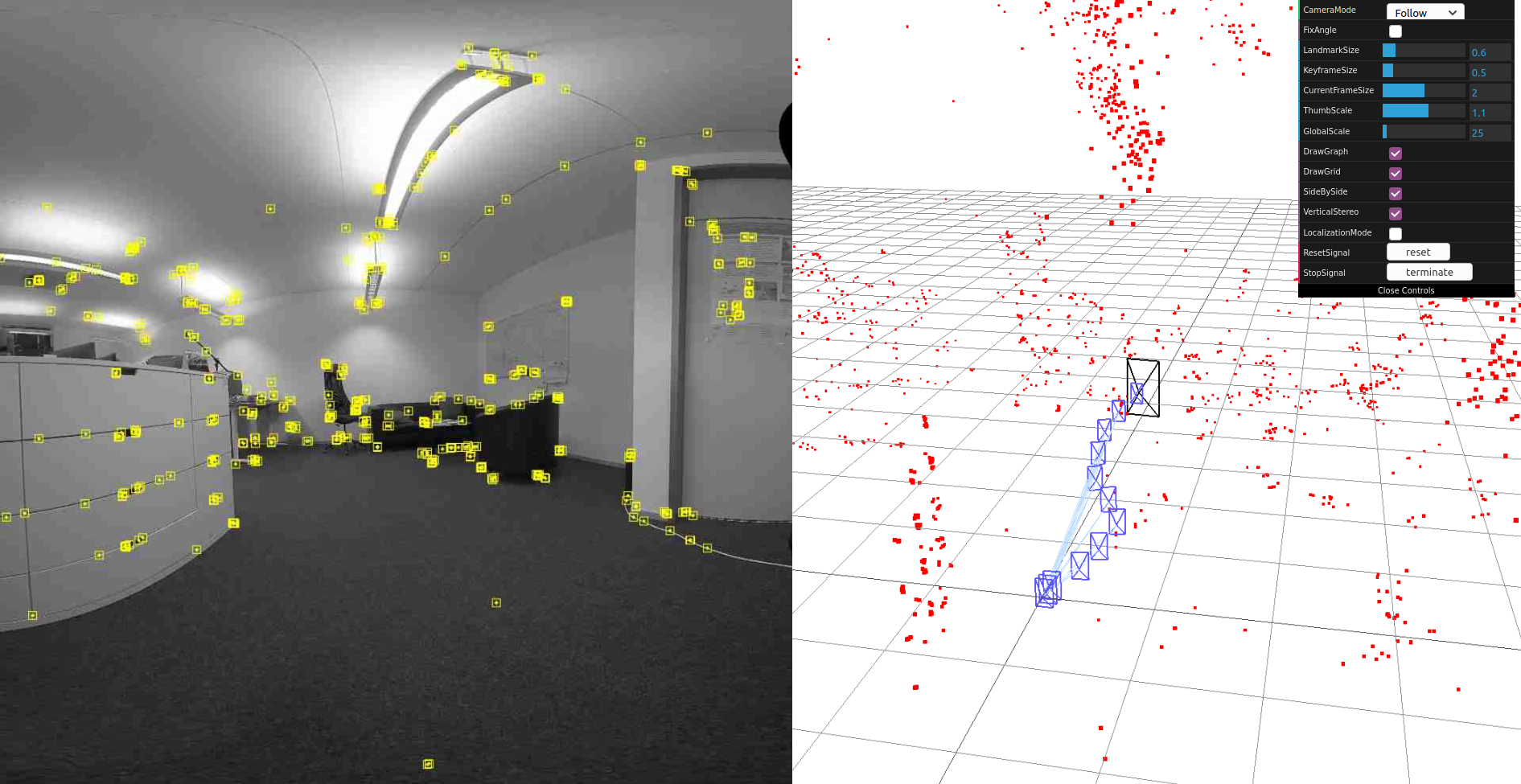
Fig. 1.1: Visualization of the slam algorithm
To terminate the application, use the “terminate” button of the viewer.
For restarting the slam algorithm, the app should be restarted via:
sudo hemistereo_app_stop slam
sudo hemistereo_app_start slam