Hardware specification
Note
Informations may be used for reference only. All features and specifications are subject to change without notice.
Scope of delivery
The delivery of a HS-NX includes only the sensor, power supply and a quick start guide. The complete manual is available in digital form at https://docs.3dvisionlabs.com/hs-nx/index.html
Note
Wiring
Mounts
are NOT included in the delivery. For detail about recommended components please refer to Accessories
Technical specifications
Fig. 6.1 gives an overview about the main features of HS-NX
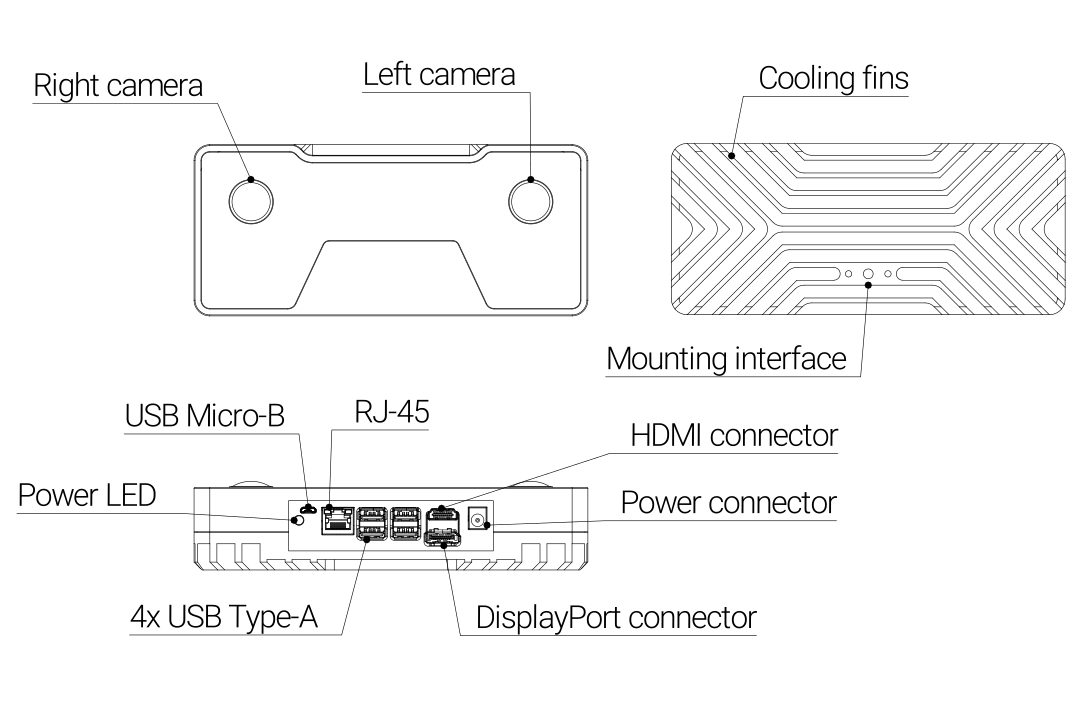
Fig. 6.1: HS-NX main features
HS-NX is available in two different optical configurations.
Fisheye Stereo Vision (HS-NX-180)
Wide-Angle Stereo Vision (HS-NX-90)
The optical specifications for the two different available optical configurations are shown in Table 6.1.
Optical Configuration |
||||
HS-NX-180 |
HS-NX-90 |
|||
Depth Sensing Technology |
HemiStereo® - binocular stereo vision technology for extreme wide-angle depth sensing using Deep Neural Network based stereo correspondence matching |
|||
Lenses |
High-resolution all-glass lenses |
|||
2.0 mm Fisheye Aperture: F/2.2 Filter: 650nm IR-cut filter (ICF) S-Mount |
2.7 mm Low-Distortion Wide-Angle Aperture: F/2.8 Filter: 650nm IR-cut filter (ICF) S-Mount |
|||
Field of View |
180° × 145° (H × V) |
85° × 67° (H × V) |
||
Image Sensor |
Sony IMX477 (using included Raspberry Pi High Quality Camera Module) 12.48 MP Stacked Back-Side Illuminated Type 1/2.3”, 1.55μm pixel pitch Rolling Shutter |
|||
Image Resolution |
4032 × 3040 |
|||
Depth Resolution |
up to 4096 x 3072 |
|||
Base Length |
142.0 mm |
|||
Depth Frame Rate |
Depth Resolution |
Quality Near |
Quality Far |
Fast |
4096 × 3072 |
0.5 FPS |
1.0 FPS |
5.0 FPS |
|
2048 × 1536 |
2.4 FPS |
4.5 FPS |
17.5 FPS |
|
1024 × 768 |
8.7 FPS |
14.9 FPS |
28.5 FPS |
|
512 × 396 |
25.0 FPS |
28.0 FPS |
28.5 FPS |
|
Axial Depth Precision |
±0.1 mm @ 0.5 m ±0.3 mm @ 1.0 m ±1.3 mm @ 2.0 m ±8.2 mm @ 5.0 m ±32.7 mm @ 10.0 m |
±0.06 mm @ 0.5 m ±0.25 mm @ 1.0 m ±1.0 mm @ 2.0 m ±6.3 mm @ 5.0 m ±25.3 mm @ 10.0 m |
||
Range |
0.5 m – 10 m |
0.5 m – 10 m |
||
Note
For depth frame rate measurement, depth matching was computed locally on the integrated Jetson Xavier NX module using HS-NX90X. Modes: Quality Near = SGM-128 / Quality Far = SGM-64 / Fast = BM-128
Note
Precision values are result of calculation of the theoretical maximum based on the given stereo camera setup. Practical values may be affected by image noise, ambient illumination and surface texture.
Note
The image resolution may be set to 2016x1520 pixels, which decreases the rolling shutter effect and is beneficial for the imager sensitivity (noise and brightness). This behavior is called “binning” and can be enabled via software. For information on how to use it, see application service.
HS-NX is available in two different embedded computing configurations using the following Developer Kits
N: NVIDIA® Jetson Nano™
X: NVIDIA® Jetson Xavier NX™
The computional specifications for the two different embedded computing configurations are shown in Table 6.2.
Edge Compute Configuration |
||
NVIDIA® Jetson Xavier NX™ |
NVIDIA® Jetson Nano™ |
|
CPU |
ARMv8.2 (64-bit) heterogeneous multi- processing (HMP) CPU architecture 3x dualcore CPU clusters (six NVIDIA Carmel processor cores) connected by a high- performance system coherency interconnect fabric L3 Cache: 4 MB (shared) NVIDIA Carmel (Dual-Core) Processor: L1 Cache: 128 KB L1(I-cache) per core 64 KB L1 (D-cache) per core L2 Unified Cache: 2 MB per cluster Maximum Operating Frequency: 1900 MHz |
ARM® Cortex® -A57 MPCore (Quad-Core) Processor with NEON Technology L1 Cache: 48KB L1 (I-cache) per core 32KB L1 data cache (D-cache) per core L2 Unified Cache: 2MB Maximum Operating Frequency: 1.43GHz |
GPU |
Volta GPU 384 NVIDIA® CUDA® cores 48 Tensor cores End-to-end lossless compression Tile Caching OpenGL® 4.6 OpenGL ES 3.2 Vulkan™ 1.1 CUDA 10 Maximum Operating Frequency: 1100 MHz |
Maxwell GPU 128-core GPU End-to-end lossless compression Tile Caching OpenGL® 4.6 OpenGL ES 3.2 Vulkan™ 1.1 CUDA® Maximum Operating Frequency: 921MHz |
RAM |
8 GB 128-bit LPDDR4x DRAM Secure External Memory Access Using TrustZone® Technology System MMU Maximum Operating Frequency: 1600 MHz |
4 GB 4ch x 16-bit LPDDR4 DRAM Dual Channel System MMU Maximum Memory Bus Frequency: 1600MHz Peak Bandwidth: 25.6 GB/s |
Interfaces |
Gigabit Ethernet, RJ-45 HDMI and DisplayPort Connector 4x USB 3.1 Type-A 1x USB 2.0 Micro-B GPIO, I2C, I2S, SPI, UART (internal) M.2 Key-E (internal) + M.2 Key M |
Gigabit Ethernet, RJ-45 HDMI and DisplayPort Connector 4x USB 3.0 Type-A 1x USB 2.0 Micro-B GPIO, I2C, I2S, SPI, UART (internal) M.2 Key-E (internal) |
Power Input |
5V |
|
TDP |
10W - 15W |
5W - 10W |
General dimensions of HS-NX are shown in Fig. 6.2. Simplified 3D data (STEP) can be downloaded here.
Note
3D data are for reference only. Accuracy of the models cannot be guaranteed.
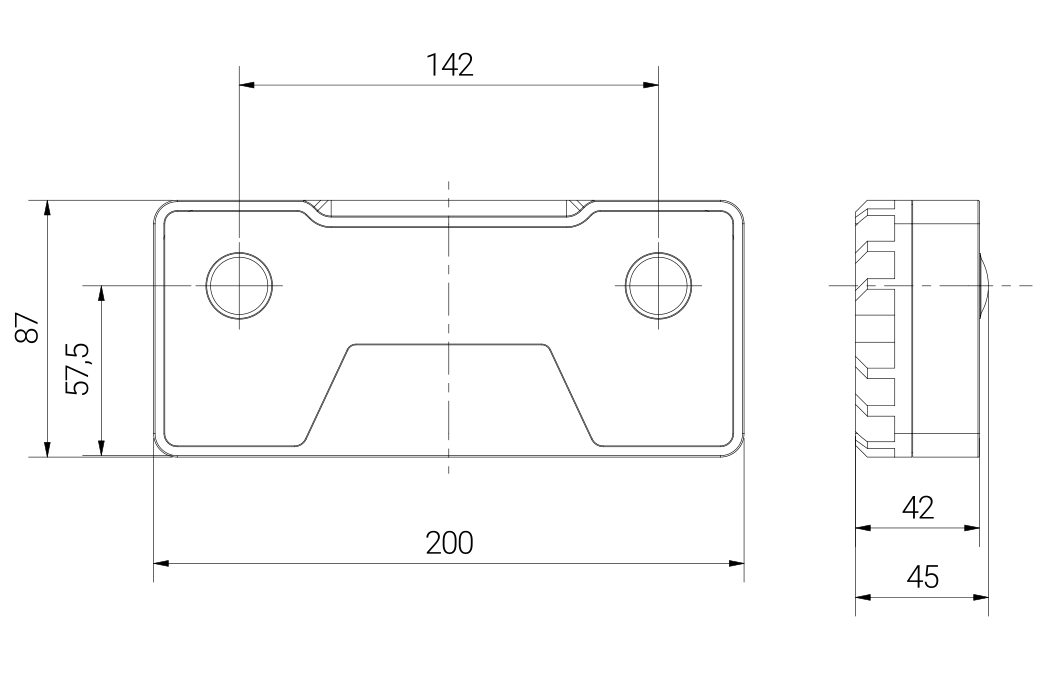
Fig. 6.2: HS-NX main dimensions
Operating conditions
HS-NX is designed for use under specific operating conditions defined in Table 6.3. These operating conditions must always be adhered to.
Power Requirements |
||
N |
X |
|
Operating Voltage |
4.75 - 5.25 V DC (5V power supply incl.) |
10.0 V - 19.0 V DC (19V power supply incl.) |
Physical Connectors |
USB 2.0 Micro-B (up to 2A) 2.1 × 5.5 × 9.5 mm DC barrel jack |
2.5 × 5.5 × 9.5 mm DC barrel jack |
Max. Power Consumption |
15 W |
20 W |
Environmental Requirements |
||
Temperature Range |
-20 °C to 50 °C |
|
Dust and Moisture |
Case provides some level of protection against splashing water and dust. Jetson Developer Kit IO Interface remains sensitive to ingress of water and dust. (no IP rating) |
|
Cooling |
Passively cooled within operating range by full metal body machined from Aluminum. |
|
Illumination |
Some form of external illumination is required. (IR illumination is possible. Please contact sales for product variant without IR cut filter). |
|
Physical Information |
||
Dimensions |
200 mm × 87 mm × 45 mm (W × L × H) |
|
Weight |
0.85 kg |
|
Mounting Options |
1× 1/4-20 UNC standard tripod mount 2× M4×0.7-6H blind tapped holes |
|
Note
HS-NX is passively cooled. To ensure proper cooling an unobstructed airflow around the enclosure is necessary, especially around the cooling fins. Please use only the provided mounting options and leave at least 10 cm of clearance around the enclosure.
Power supply
HS-NX is driven by a DC power source. A suitable power supply for the respective model is part of the delivery. If a customer specific solution for the power supply unit is to be used, the specifications described in Table 6.3 must be met.
Warning
Using a power supply that does not fulfill the above specifications may result in irreversible damage of HS-NX!
Wiring
Cables are not included in the scope of delivery. The responsibility for proper wiring is up to the user. The possible options for connecting the device are shown in Fig. 6.1.
Warning
Always make sure that the cables are properly strain-relieved. A load on the connections of HS-NX due to cable movement must be avoided. Also pay attention to the correct bending radii of the cables during installation.
Mounting options
HS-NX offers multiple mounting options on the back of the enclosure. Please see Fig. 6.3 for details. For setup or static applications the 1/4-20 UNC standard tripod mount can be used. For dynamic scenarios the mounting with two M4 screws (strength class 8.8) is required. The screws have to be tightened with a torque of 2.6 Nm and must be secured with medium strength threadlocker (e.g. Loctite 243) against unintentional loosening.
For a wide range of standard applications, an optional, adjustable universal mount is available. For more details please refer to Accessories.

Fig. 6.3: HS-NX mounting options
Coordinate system
Two different coordinate systems are defined for HS-NX. A camera coordinate system and a mounting coordinate system. The origin of the camera coordinate system is positioned in the center of the left camera. The mounting coordinate system is positioned in the center of the tripod mounting hole. The approximate location and orientation of the coordinate systems for the two different optical configurations is shown in Fig. 6.4 and Fig. 6.5.
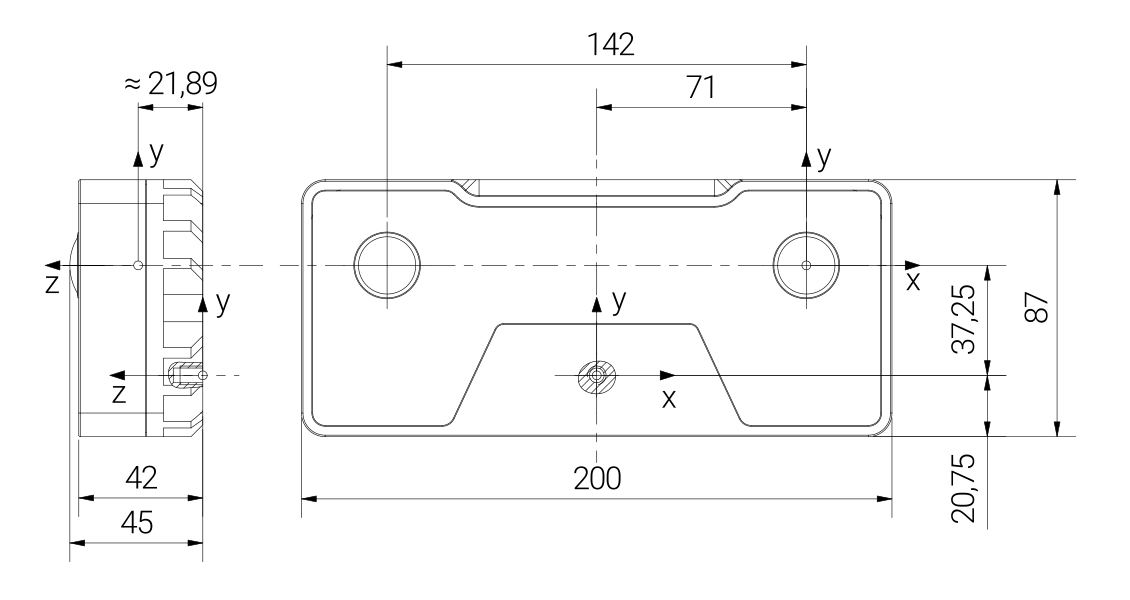
Fig. 6.4: HS-NX-90: location of coordinate systems

Fig. 6.5: HS-NX-180: location of coordinate systems